11:46 Бионическая «рука» ловит объекты на лету | |
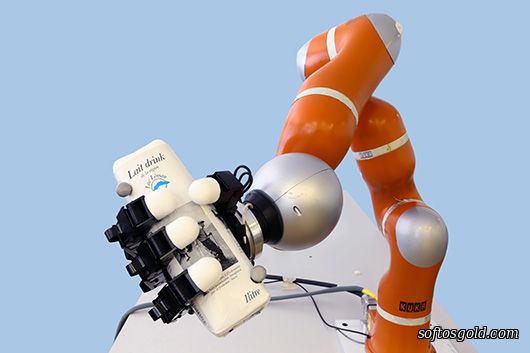
Робот, разработанный в EPFL, обладает мгновенной реакцией, позволяющей ему менее, чем за пять сотых секунды ловить механической рукой предметы сложной формы, брошенные в его направлении по произвольной траектории. Рука длиной около полутора метров имеет три сустава и кисть с четырьмя пальцами. В состоянии готовности робот ее держит поднятой вверх. Алгоритм, управляющий действиями робота, создан в лаборатории LASA (Learning Algorithms and Systems Laboratory) EPFL. «Все более широко представленные в нашей повседневной жизни и используемые для выполнения различных задач роботы получат способность ловить быстродвижущиеся объекты или уклоняться от них, — говорит глава LASA, Оди Биллард (Aude Billard). — Нам нужны машины, которые могут не только мгновенно реагировать, но и предсказывать динамику движущихся объектов, а также генерировать движение в обратном направлении». Роботизированный манипулятор, описанный вчера в специализированном журнале IEEE transactions on robotics, создавался с прицелом на вполне реальное приложение. Проект Clean- mE Швейцарского Космического Центра призван разработать технологии для сбора и утилизации космического мусора, накапливающегося на околоземных орбитах. Укрепленный на спутнике манипулятор должен будет ловить летящие фрагменты, динамика которых заранее неизвестна, и должна быть установлена на основе непосредственного наблюдения за их приближением. «Сегодняшние машины, как правило, запрограммированы предварительно и не могут быстро адаптироваться к изменяющимся данным, — отмечает Биллард. — Естественно, им приходится пересчитывать траектории, что занимает слишком много времени в ситуациях, когда каждая доля секунды может оказаться решающей». Для того, чтобы получить желаемые скорость и адаптируемость исследователи LASA прибегли к человеческому способу обучения: посредством имитации, проб и ошибок. Эта методика, называемая программирование путем демонстрации, не дает конкретных указаний роботу. Вместо этого ему показывают примеры возможных траекторий, вручную подводят манипулятор к цели, и повторяют это упражнение несколько раз. В качестве объектов для опытов были выбраны мяч, пустая и наполовину полная бутылки, молоток и теннисная ракетка. На первой фазе обучения многочисленные камеры робота регистрировали скорость, траекторию и вращательное движение брошенного в его сторону объекта, на основании чего создавалась кинетическая модель. В дальнейшем, за несколько миллисекунд сближения, роботу требовалось лишь уточнить эту модель для реального объекта, и скорректировать траекторию его захвата. Эффективность выполнения этой задачи дополнительно увеличивалась благодаря контроллерам, отвечающим за синхронизацию движений кисти и пальцев. | |
|
| |
| Всего комментариев: 0 | |
